SAQIEL: Ultra-Light and Safe Manipulator with
Passive 3D Wire Alignment Mechanism
- Temma Suzuki
- Masahiro Bando
- Kento Kawaharazuka
- Kei Okada
- Masayuki Inaba
- JSK Robotics Laboratory, The University of Tokyo, Japan
Improving the safety of collaborative manipulators necessitates the reduction of inertia in the moving part. Within this paper, we introduce a novel approach in the form of a passive 3D wire aligner, serving as a lightweight and low-friction power transmission mechanism, thus achieving the desired low inertia in the manipulator's operation. Through the utilization of this innovation, the consolidation of hefty actuators onto the root link becomes feasible, consequently enabling a supple drive characterized by minimal friction. To demonstrate the efficacy of this device, we fabricate an ultralight 7 degrees of freedom (DoF) manipulator named SAQIEL, boasting a mere 1.5 Kg weight for its moving components. Notably, to mitigate friction within SAQIEL's actuation system, we employ a distinctive mechanism that directly winds wires using motors, obviating the need for traditional gear or belt-based speed reduction mechanisms. Through a series of empirical trials, we substantiate that SAQIEL adeptly strikes balance between lightweight design, substantial payload capacity, elevated velocity, precision, and adaptability.
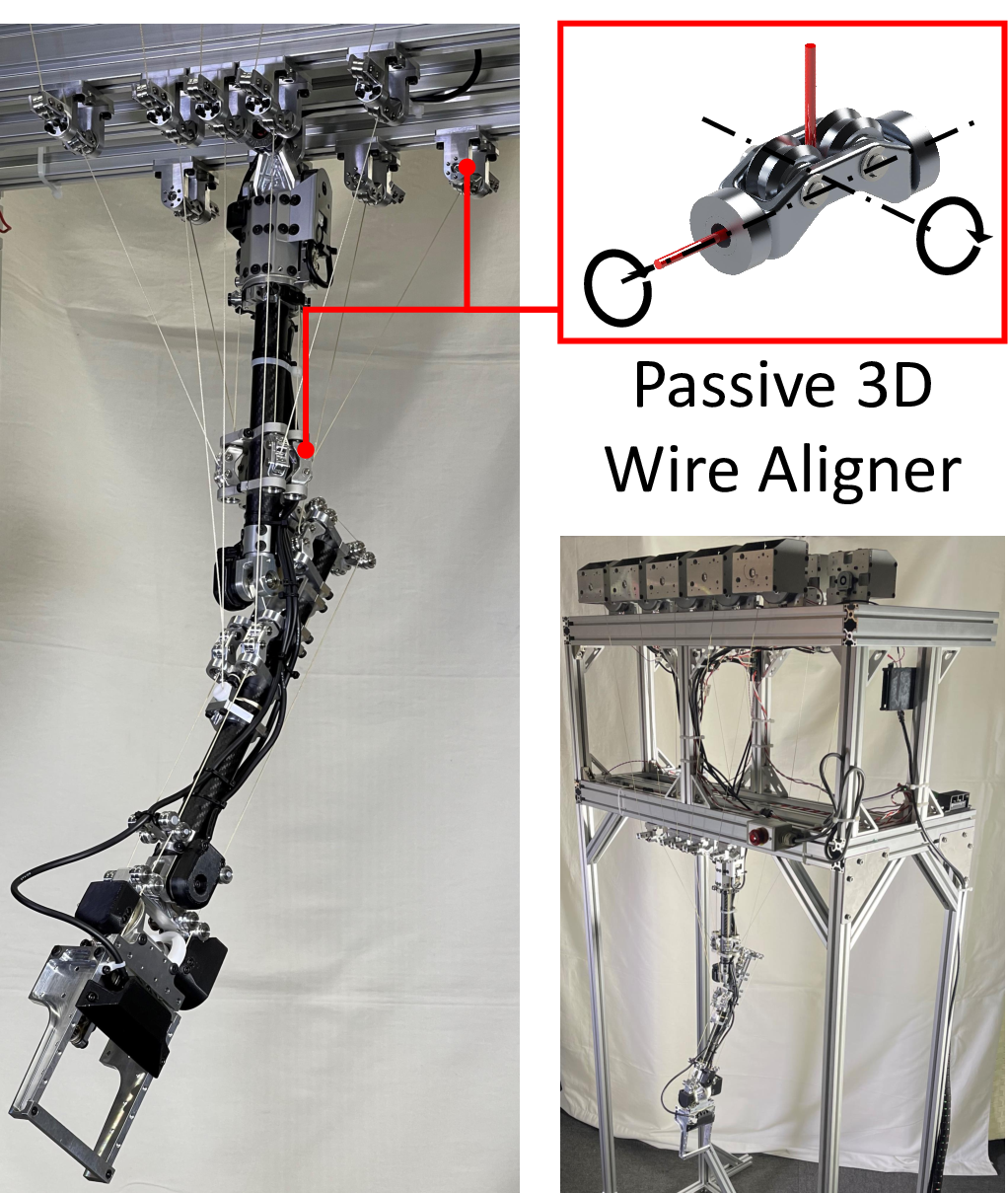
Passive 3D Wire Aligner
The detailed structure of the passive 3D wire aligner is illustrated in the figure below.
When a wire passes through this device, it aligns with a predetermined straight line regardless of the angle at which the wire enters the device.
By installing a wire aligner on each of the two links, a wire path connecting the two links in a straight line can be established.
The advantages of the wire aligner lie in its lightweight design and low friction.
In conventional coupled tendon-driven systems, the required number and weight of pulleys increase proportionally with the number of joints they traverse.
In contrast, this method enables power transmission between the two links without passing through intermediate joints by using only one set of wire aligners.
Furthermore, this approach employs grooved pulleys with built-in bearings to guide the wire, eliminating sliding parts and reducing friction.
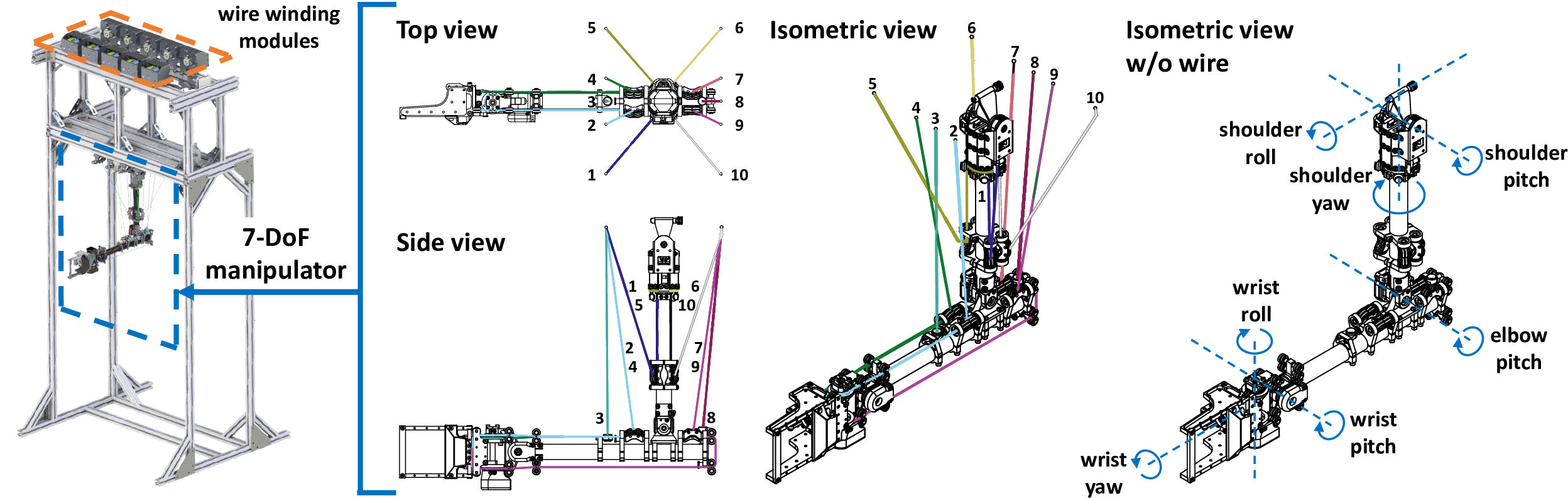
Design of a 7-DoF manipulator with Passive 3D Wire Aligner, SAQIEL
We create a 7-degree-of-freedom manipulator, termed SAQIEL (SAfe, QuIck and Extremely Lightweight manipulator) for the purpose of validating the performance of the passive 3D wire aligner. The design objectives of SAQIEL are as follows:
- Minimization of effective mass.
- Reduction of friction in the power transmission system.
For design goal 2), SAQIEL employs a mechanism in which motors directly wind the wires without the use of gear or belt-based reduction mechanisms. Additionally, through the use of multiple small pulleys in the wire path to eliminate sliding parts, low-friction power transmission is achieved.
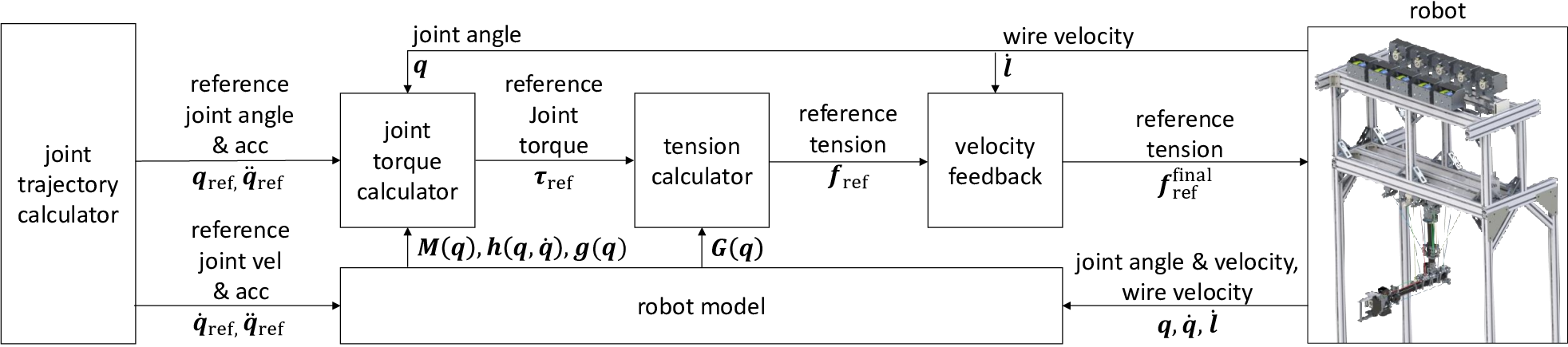
Motion Controller
The controller of SAQIEL is depicted in figure below. SAQIEL employs a control strategy based on the Computed Torque Method. However, due to the adoption of the coupled tendon-driven mechanism, the desired joint torques are transformed into target wire tensions after computation.
Payload Test: 3.7 Kg weight
SAQIEL can lift 3.7 Kg weight.
High Speed Motion Test
The maximum end-effector velocity of SAQIEL is larger than 18.5 m/s.
Accuracy Test
The maximum position error of the end effector during a circular trajectory tracking is 11 mm.
Passive Collision Test
SAQIEL can withstand the impact of a 10 kg weight dropped from 1 m above the robot.
Active Collision Test
SAQIEL allows safe contact with the environment even during high-speed operation.
Ball Hitting Test
SAQIEL can recognize and hit a ball flying at 4 m/s.
Bibtex
@inproceedings{suzuki2024saqiel,
title={SAQIEL: Ultra-Light and Safe Manipulator with Passive 3D Wire Alignment Mechanism},
author={Suzuki, Temma and Bando, Masahiro and Kawaharazuka, Kento and Okada, Kei and Masayuki, Inaba},
booktitle={IEEE Robotics and Automation Letters},
pages={1-8},
year={2024},
}
Contact
If you have any questions, please feel free to contact Temma Suzuki (gmail: t-suzuki @ jsk.imi.i.u-tokyo.ac.jp).